

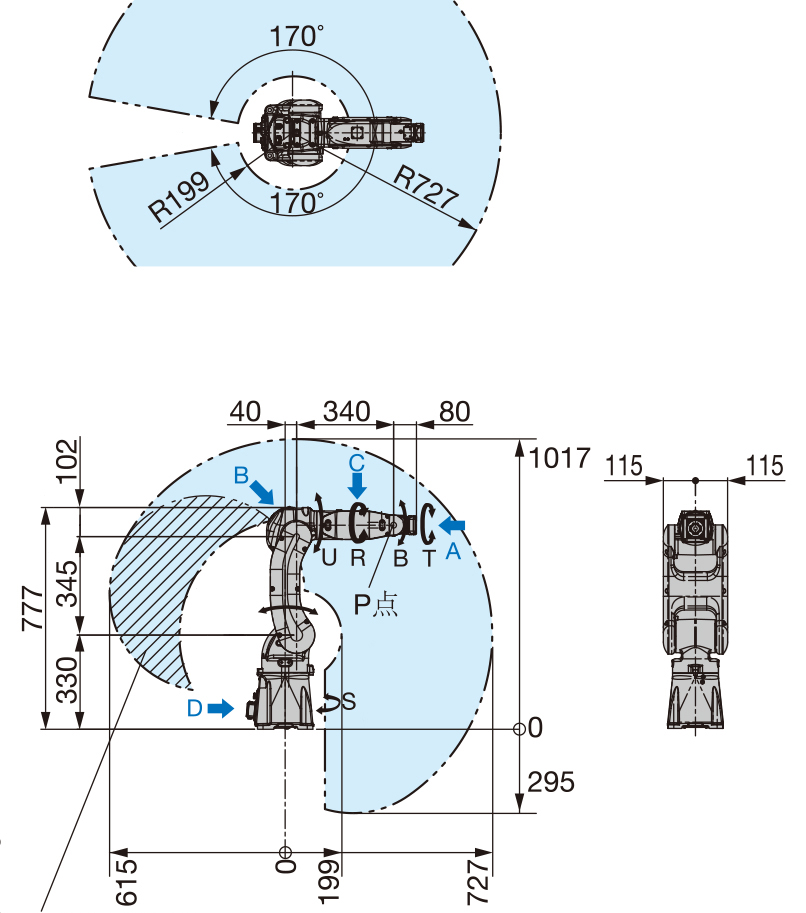
Assemble and move palletizing robot GP8
| Model: | MOTOMAN-GP8 |
| DOF: | 6 |
| Horizontal extension length: | 727mm |
| Removable mass: | 8kg |
| Repositioning resolution: | ±0.01mm |
| Protection grade: | IP67 |
| Installation methods : | Place type, wall type, upside down type, tilt type |
| Application: | Handling, picking/packing, palletizing, assembling/sub-packing |
|
Production efficiency has been greatly improved The synthetic speed is about 30% higher than the original model to achieve beat time reduction The design of reducing the interference between the arm and the peripheral equipment is adopted Using hollow arm structure, can be the sensor cable and gas pipeline built in Solid construction for anti-interference The robot wrist part adopts IP67 standard It can be drawn from the corresponding joint base facing down |
Improve maintainability Reduce the number of cables between the robot and the control cabinet Improve the maintenance while providing simple equipment Greatly reduce the cable regular replacement operation time
|




 Shandong Dyehome Intelligent Equipment Co.,Ltd
Shandong Dyehome Intelligent Equipment Co.,LtdPhone:0086-17362172587
Whatsapp:+8617362172587
Email:machinedyehome@gmail.com
Add:Building 62, 3000 Meili East Road, DmiPark, Wujiapu Street, Huaiyin District, Jinan City,Shandong Province
Jinan Jiasen Packaging Equipment Co., LtdPhone:0086-15665802370
Add:High-end Equipment Manufacturing Industrial Park, East Industrial New Town, Ancheng Town, Pingyin County, Jinan City, Shandong Province
Shandong Golden Pack Intelligent Equipment Co.,LtdPhone:0086-15662690213
Add:High-end Equipment Manufacturing Industrial Park, East Industrial New Town, Ancheng Town, Pingyin County, Jinan City, Shandong Province
YoursIndustry
OurSolutions
OurServices
OurInformation